地球上的大多數生物體經(jīng)過(guò)長(cháng)期進(jìn)化選擇可根據所處的外界環境快速産生适應性自身形變和/或可控運動以躲避危險、生存繁衍。例如,自然界中的植物如風滾草在逃離幹旱地區、昆蟲如金輪蜘蛛在躲避天敵襲擊等情況下,會選擇性地先將(jiāng)自身變形爲球狀,進(jìn)而通過(guò)“翻滾”運動的形式快速離開(kāi)當前不利環境。通過(guò)人工合成(chéng)材料的程序化可控設計、模仿甚至超越生物體的智能(néng)驅動行爲,是仿生材料領域研究的前沿熱點及難點之一。軟體驅動材料可將(jiāng)外界物理刺激(熱、電、光、磁等)或化學(xué)刺激(pH、溶劑、離子強度等)轉變爲自身的機械變形,在人造肌肉、柔性機器人等方面(miàn)展現出巨大的應用前景。在仿生無束縛形變方面(miàn),基于形狀記憶聚合物、液晶彈性體、高分子水凝膠等軟體驅動器已取得了重要的研究進(jìn)展,然而如何以溫和便捷的方法構築類似于生物體的兼具快速形變、可編程及運動功能(néng)的仿生軟體驅動材料與器件則仍然面(miàn)臨著(zhe)巨大挑戰。
針對(duì)上述問題,中國(guó)科學(xué)院甯波材料技術與工程研究所陳濤研究員團隊開(kāi)發(fā)了一種(zhǒng)可編程性強、驅動速度快的光控無約束軟體驅動器,其不僅可在紅外光的控制下進(jìn)行可控的自身形變,還(hái)可通過(guò)限域回火處理實現仿生“翻滾”式快速運動和用作運輸物品的軟體機器人(Nat. Commun., 2020, 11, 4359, doi.org/10.1038/s41467-020-18214-0)。研究人員將(jiāng)前期研究在水/空氣界面(miàn)組裝的大面(miàn)積石墨烯薄膜(SGA)(ZL201510466050.3;Chem. Mater., 2016, 28, 7125;ACS Nano, 2019, 13, 4368;Nano Energy, 2019, 59, 422)轉移到熱膨脹系數遠高于石墨烯的商用聚乙烯材質的保鮮膜(PE)上得到SGA/PE雙層複合膜(圖1a-c)。所得SGA/PE在外界熱刺激下表現出通常雙層膜驅動器常見的驅動行爲(圖1d),值得注意的是,若進(jìn)行如鋼鐵冶金行業的回火處理,該複合膜通過(guò)限域回火處理後(hòu),可得到初始構型可調的SGA/PE驅動器,初始構型變形曲率可通過(guò)SGA膜層數和回火處理溫度進(jìn)行精确調控(圖1e-g)。
尤其重要的是,通過(guò)與香港理工大學(xué)姚海民教授團隊在分子動力學(xué)模拟和有限元分析上的合作,表明SGA層具有非對(duì)稱彈塑性力學(xué)性能(néng),SGA受拉伸時由于内部各石墨烯片層之間不可逆的相對(duì)滑動而表現爲高塑性,SGA受壓縮時由于可逆的屈曲褶皺變形表現爲高彈性。在受限空間下的回火處理過(guò)程中正是SGA層非對(duì)稱彈塑性力學(xué)性能(néng)使得SGA/PE具有室溫構型可編程性能(néng),通過(guò)理論計算得到的回火處理的SGA/PE變形曲率和實際變形曲率具有良好(hǎo)的一緻性(圖2)。
進(jìn)一步通過(guò)圖案化的石墨烯薄膜和/或局部回火預處理策略,實現了對(duì)這(zhè)種(zhǒng)熱誘導變形系統的初始構型的定制化編程設計,從而創建了具有三維複雜驅動的形變系統。基于這(zhè)種(zhǒng)優異的形狀變形控制性能(néng),研究者將(jiāng)SGA/PE應用于開(kāi)發(fā)各種(zhǒng)熱或光響應驅動器件,包括人工虹膜、人工睡蓮(視頻1),仰卧起(qǐ)坐機器人等固定位置的自身變形體系(圖3)。
特别需要提及的是,限域回火處理後(hòu)的SGA/PE雙層膜在室溫下自發(fā)卷曲成(chéng)多層卷構型,可用于構築不受束縛的光控運動器件,其在外界側向(xiàng)紅外光照刺激下可實現在平地與模拟沙漠上的連續翻滾前進(jìn)運動(圖4a-b,視頻2),還(hái)可組裝成(chéng)四軸運動的摩托機器以及基于此的可運輸物品的軟體機器人(圖4c,視頻3和4)。
該策略爲開(kāi)發(fā)具有可編程、無束縛的軟體機器人提供了一個新思路,該研究得到了國(guó)家自然科學(xué)基金、中國(guó)科學(xué)院國(guó)際合作局重點項目資助、中國(guó)科學(xué)院前沿科學(xué)重點研究項目、NSFC-浙江兩(liǎng)化融合聯合基金、香港研究資助局研究基金、中國(guó)博士後(hòu)科學(xué)基金等的資助。
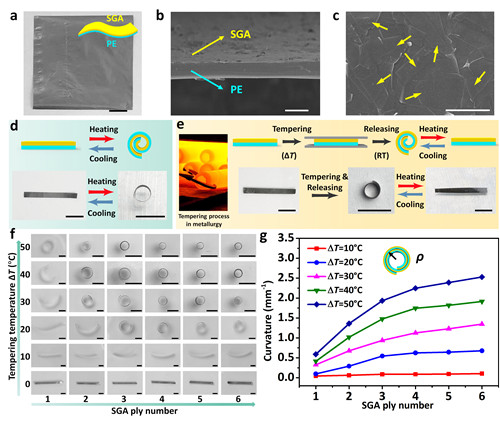
圖1 a-c) SGA/PE雙層複合膜形貌;(d) 常規熱驅動變形;e) 限域回火處理變形;f-g) 限域回火形變調
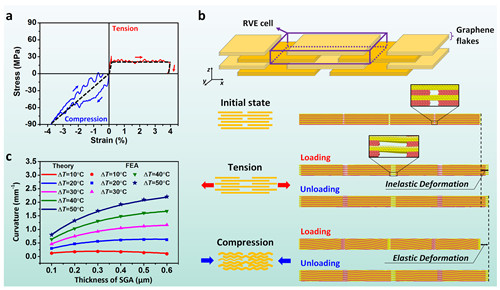
圖2 分子動力學(xué)模拟計算SGA層在拉伸和壓縮時的變形行爲
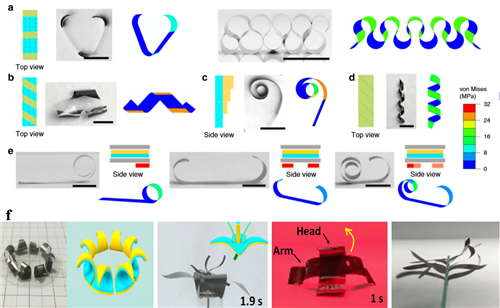
圖3 通過(guò)不同策略 (a-d圖案化SGA和PE層、e局域回火處理) 編程SGA/PE初始構型;f) 虹膜、百合、仰卧起(qǐ)坐機器人、含羞草
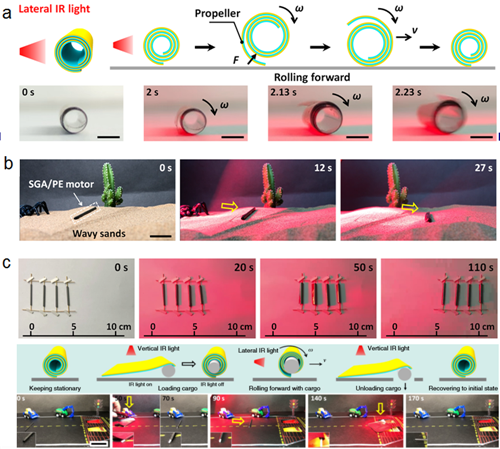
圖4 a) 限域回火處理實現翻滾式運動行爲,b) 仿金輪蜘蛛的沙漠滾動行爲,c) 組裝摩托運動行爲與運輸軟體機器人
視頻1 仿生睡蓮太陽光驅動開(kāi)合
視頻2 紅外光驅動滾筒進(jìn)行“翻滾”運動
視頻3 組裝摩托車運動
視頻4 智能(néng)搬運及卸載