基于中國(guó)科學(xué)院甯波材料技術與工程研究所陳濤研究員課題組在柔性傳感器和軟驅動器方面(miàn)的研究基礎(Adv. Mater., 2020, 2004290; Nat. Commun., 2020, 11, 4359; Angew. Chem. Int.Ed., 2019, 58,16243; J. Mater. Chem. A, 2019, 7, 26631; ACS Nano, 2019, 13, 4368; Nano Energy, 2019, 59, 422; Adv. Funct. Mater., 2018, 28, 1704568; Chem. Mater., 2018, 30, 4343; J. Mater. Chem. C, 2018, 6, 5140; J. Mater. Chem. C, 2018, 6, 6666等)。近期,受到小醜魚魚鳔同時具有感知和變形驅動功能(néng)的啓發(fā),開(kāi)發(fā)了一種(zhǒng)水下自感知的軟驅動器。
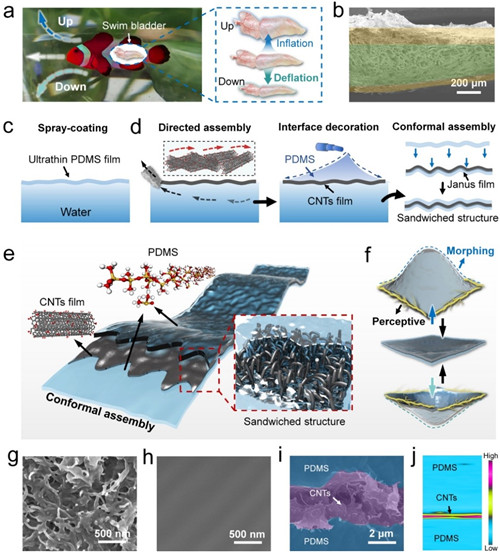
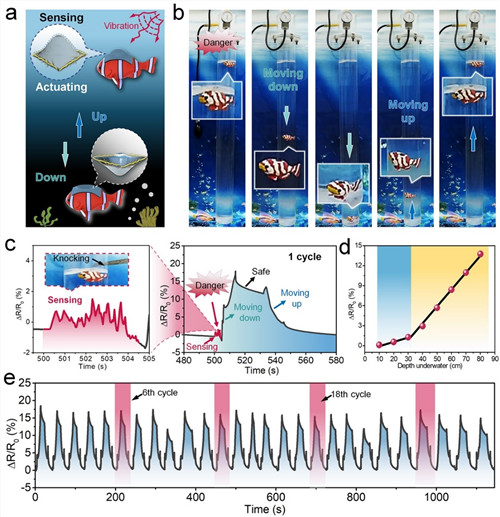
該工作通過(guò)在水/空界面(miàn)制備超薄的聚二甲基矽氧烷(PDMS)和PDMS/碳納米管(CNTs) Janus膜,由于其良好(hǎo)的自适性和粘性,通過(guò)將(jiāng)上述薄膜無縫轉移集成(chéng)爲一個三明治複合膜,以模仿魚鳔膜。以可拉伸的彈性PDMS基體模仿魚鳔的充氣/放氣變形行爲,而用導電CNTs網絡薄膜模仿魚鳔具有類似皮膚神經(jīng)網絡的感知功能(néng)。由于複合薄膜良好(hǎo)的彈性、自适性和保形性,它可以進(jìn)一步轉移至一個中空的模型上形成(chéng)自封閉的人工魚鳔。外界氣壓的變化時,會引起(qǐ)複合膜發(fā)生膨脹或者凹陷變形。根據壓阻傳感機理,複合薄膜的這(zhè)種(zhǒng)形變會引起(qǐ)碳納米管導電網絡間接觸電阻的變化,從而實現對(duì)變形行爲的實時監測。當將(jiāng)整個系統置于水中時,可以用膜的膨脹和凹陷行爲模仿魚鳔的充氣/放氣行爲,通過(guò)調節外界氣壓可以實現對(duì)整個系統在水中的上下運動行爲的精确控制,同時其運動過(guò)程也可以通過(guò)電信号實時監測。此外,還(hái)能(néng)實現對(duì)外界信号的監測感知并根據感知信号執行氣動驅動行爲。因此,該研究成(chéng)功地將(jiāng)傳感和驅動功能(néng)集成(chéng)到一個三明治複合膜中,實現了協同仿生行爲,在智能(néng)集成(chéng)軟機器人方面(miàn)展示出巨大的潛力。
該工作以題爲“Biomimetic Underwater Self-Perceptive Actuating Soft System Based on Highly Compliant, Morphable and Conductive Sandwiched Thin Films”的論文發(fā)表在Nano Energy, 2020, DOI.org/10.1016/j.nanoen.2020.105617。本研究得到了國(guó)家自然科學(xué)基金(52073295,51803226)、中國(guó)科學(xué)院前沿科學(xué)重點研究項目(QYZDB-SSWSLH036)、中國(guó)科學(xué)院國(guó)際合作局(174433KYSB20170061)、博士後(hòu)創新人才支持計劃(BX20180321)、中國(guó)博士後(hòu)科學(xué)基金(2018M630695)和甯波市科技創新2025重大專項(2018B10057)等項目的資助。
(高分子與複合材料實驗室 梁雲)