近年來,中國(guó)科學(xué)院甯波材料技術與工程研究所智能(néng)高分子材料課題組陳濤研究員與張佳玮研究員一直緻力于智能(néng)變形水凝膠的研究(Adv. Funct. Mater. 2016, 26, 8670; Chem. Sci. 2016, 7, 6715; Chem. Soc. Rev. 2017, 46, 1284; Chem. Commun. 2018, 54, 1229; Adv. Funct. Mater. 2018, 28, 1704568; Adv. Sci. 2019, 6, 1801584; Research 2019, 2384347; Angew. Chem. Int. Ed., 2019, 58, 16243; Angew. Chem. Int. Ed., 2020, 59, 19237; Small 2020, 2005461等)。近期,該團隊成(chéng)功開(kāi)發(fā)了一種(zhǒng)磁、光、熱多場協同作用的形狀記憶水凝膠,在Wiley旗下智能(néng)材料與系統新刊Advanced Intelligent Systems上受邀發(fā)表題爲 “Multi-field synergy manipulating soft polymeric hydrogel Transformers” 的研究論文,并得到了wiley旗下Advanced Science News的專題報道(dào)(https://www.advancedsciencenews.com/a-magnetically-controlled-hydrogel-for-octopus-like-robots/)。
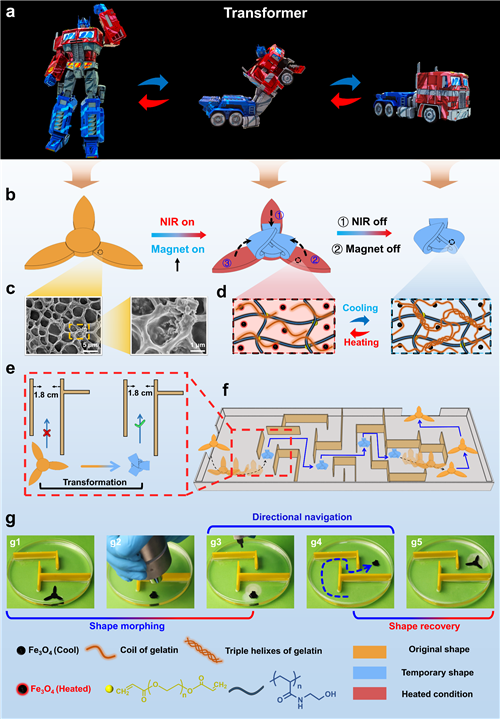
研究人員開(kāi)發(fā)了一種(zhǒng)新型光、熱、磁控制的水凝膠“變形金剛”,具有非接觸式形狀操縱和定向(xiàng)導航特性(圖1)。制備了具有化學(xué)交聯聚(N-(2-羟乙基)丙烯酰胺)(PHEAA)和可逆交聯明膠(Gelatin)網絡的雙網絡結構水凝膠。明膠是動物膠原的水解産物,鏈段之間存在大量氫鍵,随著(zhe)溫度的變化,氫鍵不斷斷裂重組,使得明膠在單鏈和三重螺旋結構之間迅速轉變。利用明膠的可逆轉變,可以具備熱響應形狀記憶性能(néng)和自愈合能(néng)力。
在水凝膠中引入Fe3O4納米顆粒,使水凝膠具有光緻加熱和磁操控能(néng)力。當近紅外光(NIR)照射水凝膠時,Fe3O4納米粒子不斷地將(jiāng)光轉化爲熱,使水凝膠被(bèi)加熱。随著(zhe)溫度的升高,明膠的三重螺旋結構會解纏繞成(chéng)單鏈,與此同時,水凝膠在磁場作用下變形爲臨時形狀。随著(zhe)溫度的降低,三螺旋結構再次纏繞以固定臨時形狀。即使撤掉磁場,臨時形狀仍可以繼續保持。當再次用NIR照射水凝膠時,明膠網絡再次由三螺旋向(xiàng)單鏈轉變,從而促使形狀回複。結合磁場産生的形狀操控,以及光誘導的形狀固定和回複,可以實現非接觸式形狀操縱行爲。
利用遠程非接觸式的形狀操控,研究人員制備了一系列水凝膠軟體機器人。由于不同Fe3O4納米粒子含量的水凝膠在同一能(néng)量密度的NIR照射下,形狀回複時間不同,研究人員設計了一朵可以順序分步綻放的花朵以模拟自然界的植物對(duì)光的敏感性。受到人健身運動的啓發(fā),研究人員制作了形态惟妙的“水凝膠運動員”,它可以在磁場和NIR的協同作用下進(jìn)行仰卧起(qǐ)坐運動。此外,由于水凝膠可以被(bèi)磁鐵引導而運動,研究人員巧妙地設計了一個三爪軟機器人,它可以在特制的迷宮中運動轉向(xiàng),更有趣的是,當軟機器人遇到小于自身寬度的狹縫時,利用磁、光的多場協同作用,可以暫時性地改變自身形狀并在通過(guò)狹縫後(hòu)迅速恢複原始形狀(圖1g)。該工作成(chéng)功實現了遠程操控水凝膠形狀變化,爲智能(néng)變形凝膠的發(fā)展提供了新思路。
該工作得到了國(guó)家重點研發(fā)計劃資助項目(2018YFB1105100),國(guó)家自然科學(xué)基金(51873223,52073295),中國(guó)科學(xué)院青年創新促進(jìn)會(2017337),中國(guó)科學(xué)院前沿科學(xué)研究重點項目(QYZDB-SSW-SLH036)等項目的支持。
(高分子與複合材料實驗室 張大川)