智能(néng)變形水凝膠作爲一種(zhǒng)軟、濕态智能(néng)材料,能(néng)在外界環境的刺激下將(jiāng)自身化學(xué)能(néng)轉化爲機械能(néng),同時伴随體積及形态的轉變,因此一直以來被(bèi)認爲是理解與驗證生物變形的理想平台。經(jīng)過(guò)多年的發(fā)展,智能(néng)變形水凝膠已然能(néng)模仿自然界中的大部分變形行爲,并展現出多刺激響應、可編程、程序化形态轉變等諸多特點。然而,自然界的生命體不僅能(néng)改變自身形态,還(hái)可將(jiāng)這(zhè)種(zhǒng)原位的變形高效地轉化爲運動,從而滿足自身示警、捕食及避險等需求。因此如何模仿生命體的運動行爲,并進(jìn)一步使智能(néng)變形水凝膠實現越野運動依然是一個巨大的挑戰。
中國(guó)科學(xué)院甯波材料技術與工程研究所智能(néng)高分子材料團隊陳濤研究員長(cháng)期從事(shì)功能(néng)與智能(néng)高分子水凝膠及其在仿生變形、變色及運動等方面(miàn)的前沿探索研究。近期,該團隊與浙江大學(xué)、之江實驗室的鄭音飛教授合作,基于前期提出的界面(miàn)擴散聚合(IDP)策略(CCS Chem. 2022, DOI: 10.31635/ccschem.022.202201942),成(chéng)功編程智能(néng)高分子水凝膠的各向(xiàng)異性結構,從而模仿尺蠖的爬行行爲,實現了智能(néng)變形水凝膠全地形的越野爬行行爲(圖1)。
爲了能(néng)實現高效的變形-運動轉變,研究人員利用冰模闆的方法,制備了具有超快溫度響應的聚N-異丙基丙烯酰胺(PNIPAm)凝膠海綿。其可在5s内收縮到自身體積的40%,并且由其制備而得的雙層水凝膠驅動器展示出88°/s的快速彎曲變形(圖2)。值得一提的是,與傳統的智能(néng)變形材料通過(guò)減小自身厚度來加快響應速度的方式不同,即使該凝膠厚度增加到2mm,其驅動速度也不會有較大損失。因此,在保證凝膠驅動變形速度的同時,PNIPAm凝膠海綿能(néng)具有更大的體積從而能(néng)將(jiāng)自身更多的化學(xué)能(néng)轉化爲機械能(néng)。
進(jìn)一步地,爲了增強凝膠變形的可控性,研究人員基于凝膠結構設計以及IDP策略,通過(guò)在PNIPAm凝膠海綿的表面(miàn)定制化地生長(cháng)含有Fe3O4納米顆粒的光熱凝膠,使得所制備的雙層水凝膠驅動器能(néng)在近紅外(NIR)光驅動下産生向(xiàng)光性及自持振動行爲(圖3)。除此之外,研究人員還(hái)可通過(guò)IDP策略,將(jiāng)制備好(hǎo)的雙層水凝膠驅動器切斷并重新排序組裝,從而實現在NIR光下的多自由度程序化變形。
基于凝膠的程序化變形,這(zhè)種(zhǒng)雙層的水凝膠驅動器能(néng)通過(guò)模仿自然界中尺蠖爬行的過(guò)程,利用時空調控的原位變形與環境的交互來實現高效的爬行運動。具體而言,一束NIR光首先照射的凝膠的頭部,由于Fe3O4納米顆粒的光熱作用與PNIPAm凝膠海綿的熱響應形變的協同作用,凝膠頭部快速彎曲變形,并與粗糙基底形成(chéng)卯榫結構增大其與基底的摩擦力。而後(hòu),NIR逐步移向(xiàng)凝膠中部,并不斷觸發(fā)所經(jīng)凝膠的熱彎曲收縮,使得凝膠整體收縮前進(jìn)。當NIR移動到凝膠尾部時,對(duì)稱相反的結構使得凝膠尾部凝膠向(xiàng)上彎曲從而擡起(qǐ)凝膠頭部,使得其與基底的卯榫結構打開(kāi),解除錨定作用。最後(hòu),當移除NIR光後(hòu),頭部的凝膠會快速回複到初始狀态從而觸發(fā)下一次循環。因此水凝膠也可在這(zhè)種(zhǒng)動态的卯榫錨定模式下,實現持續地爬行過(guò)程(圖4)。值得一提的是,利用這(zhè)種(zhǒng)動态的卯榫錨定模式,該雙層水凝膠驅動器可以适應多種(zhǒng)粗糙表面(miàn),甚至可在普通的自然沙地上實現快速爬行。
此外,得益于IDP策略對(duì)凝膠結構的編程,雙層水凝膠驅動器可進(jìn)一步仿生進(jìn)化出二維的六觸手形态,通過(guò)水凝膠觸手之間的互相配合實現快速的二維爬行。并且通過(guò)觸手的程序化變形,水凝膠還(hái)可在爬行過(guò)程中不斷調整自身體積,從而适應地形的變化,并成(chéng)功穿越隘口,山谷以及山脊等一系列複雜地形(圖5)。
該工作近期以題爲“The Dynamic Mortise-and-Tenon Interlock Assists Hydrated Soft Robots Toward Off-Road Locomotion”的論文在線發(fā)表在Science合作期刊Research(DOI: org/10.34133/research.0015)上。本研究得到了國(guó)家重點研發(fā)計劃(2022YFB3200071)、浙江省自然科學(xué)基金(LD22E050008,LD22A020002)、浙江省重點研發(fā)計劃(2022C01002)、中國(guó)科學(xué)院青年創新促進(jìn)會(2019297)、浙江省醫藥衛生重點科技項目、國(guó)家衛生健康委員會科研基金(WKJ-ZJ-2009)和國(guó)家重大科研儀器開(kāi)發(fā)項目(81827804)等項目的支持。
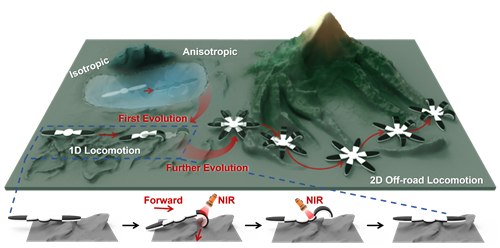
圖1 水凝膠的仿生進(jìn)化及越野爬行
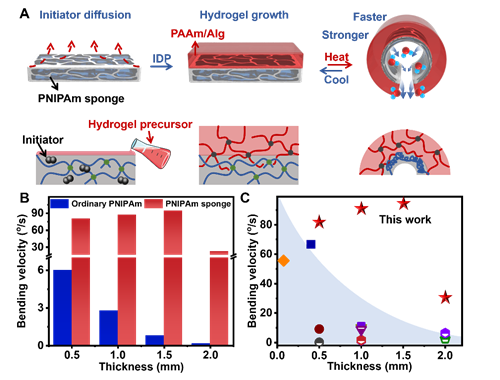
圖2 具有快速溫敏驅動的凝膠海綿
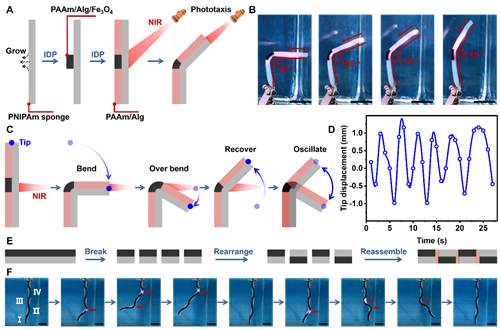
圖3 NIR下光熱水凝膠驅動器的程序化變形過(guò)程
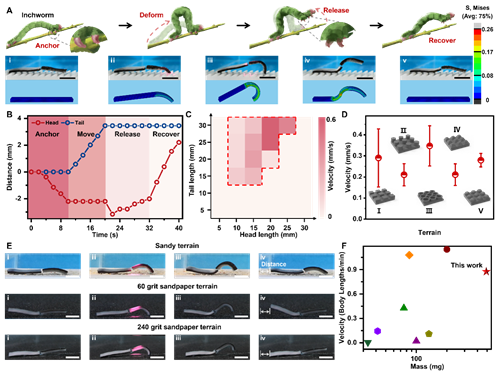
圖4 仿尺蠖多地形快速爬行
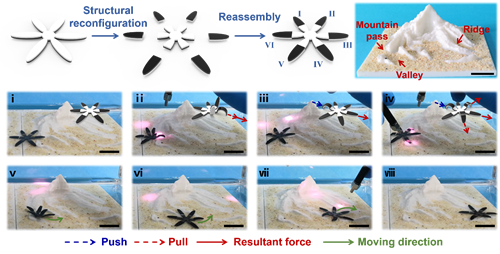
圖5 水凝膠二維越野爬行
(智能(néng)高分子材料團隊 吳寶意)